 忧郁的大能猫
忧郁的大能猫
好奇的探索者,理性的思考者,踏实的行动者。
blog/A-IT/00-CS基础/50-algorithm/拐点算法
Table of Contents:
下图的5个凸多边形是已经生成的导航网格,多边形外部的区域为不可行走区域,current为起点,goal为终点,从图中就可以看出最短路径为图中红线,蓝色圈出的点为我们需要找出的点。所有多边形顶点均按逆时针方向存储

(1)下图显示出各区域之间的入口,即多边形的临边。由图中可以看出每个临边均为起点穿出该多边形区域的边,故以下称该边为穿出边。

(2)首先找到起始点所在的多边形和穿出边的两个端点,由起点连接两个端点,形成两个线段lineLeft 和lineRight。如下图。绿色圈表示左点,红色表示右点(左点、右点是根据多边形顶点保存顺序而来)。

(3)继续找到下一个穿出边的两个端点,判断新的左点是否在lineLeft 和lineRigh之间,如果在,则更新lineLeft为起点到新左点的线段。

同样处理新穿出边的右点,如下图
该步最后得到两个新的线段,如下图。

(4) 继续判断下一个穿出边的两个端点,如下图,新的左点在lineLeft和lineRight的外面,则不更新线段。

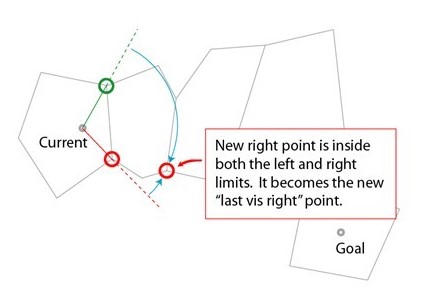
下图说明新的右点在两条直线之间,更新lineRight。

该步最后得到两个新的线段,如下图。

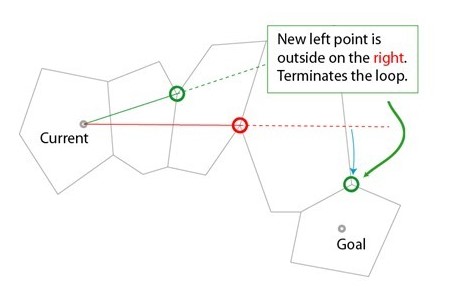
(5) 继续循环判断下一个穿出边的两个端点,该穿出边的两个端点都在lineRight的右侧,表示lineRight的终点即为路径的一个拐角点。
(6) 循环以上步骤都可以找到从起点到终点的一条完整路径。