 忧郁的大能猫
忧郁的大能猫
好奇的探索者,理性的思考者,踏实的行动者。
blog/A-IT/50-应用方向/图形/相机模型
Table of Contents:
小孔成像-针孔相机模型(Pinhole Camera Model)
(1)三维空间中的物体到相机像平面的投影关系叫做成像模型,理想的投影成像模型是光学中的中心投影,也称为针孔模型或小孔成像模型。之所以说理想模型,是因为实际相机中都存在透镜,透镜会产生图像畸变,镜头失真,所以单纯的小孔成像模型并不是很严谨。那不禁要问,为什么还要用小孔成像模型作为相机模型呢?下面我们来回答
(2)小孔成像由于透光量小,因此针孔相机要很长的曝光时间,并且得到的图像不清晰,为解决这个问题,实际摄像系统通常是由透镜组组成的,但是但是由于小孔成像和凸透镜成像具有相同的成像几何关系,即像点是物点和光心的连线与成像平面的交点,因此仍然可以用小孔成像模型作为相机成像模型。事实上这也是图像处理领域和计算机视觉领域常用的基本的相机成像理论模型之一
物点本来是向四面八方发射光线,透镜通过折射把光线重新汇聚起来成像。小孔是把其它光线隔开,只让“一根”光线通过,也能实现一个物点对应一个像点来成像。


凸透镜成像-透视投影模型(Perspective Projection Model)
我们大家都知道相机的镜头是用凸透镜做的,但为啥要用凸透镜呢 ?首先我们要了解到,最早的相机是根据小孔成像的原理制作的,那大家就又会问了,为啥不用小孔做镜头呢?专业摄影相机上的镜头花了我们多少钱,如果用小孔做镜头的话那得省多少钱呀;
这是因为小孔成像无法兼顾亮度和清晰度,孔径越小越接近理想成像系统,所以孔越小所成的像也就越清晰,但相应的亮度就会越低,所以对相机来说小孔的亮度是远远不够的,不然我们中学物理做小孔成像的实验课为啥要用蜡烛呢 ?是因为蜡烛够亮啊,
另外还有一个重要原因,小孔成像最大的问题就是成像范围太小了;
那有什么东西可以克服成像范围小的问题呢,那就是凸透镜了,凸透镜的汇聚能力可以把物体的像缩小到一个很小的范围,所以凸透镜就成了镜头了,凸透镜汇聚光线的能力就用焦距表示,焦距长,聚光能力弱,焦距短,聚光能力强;
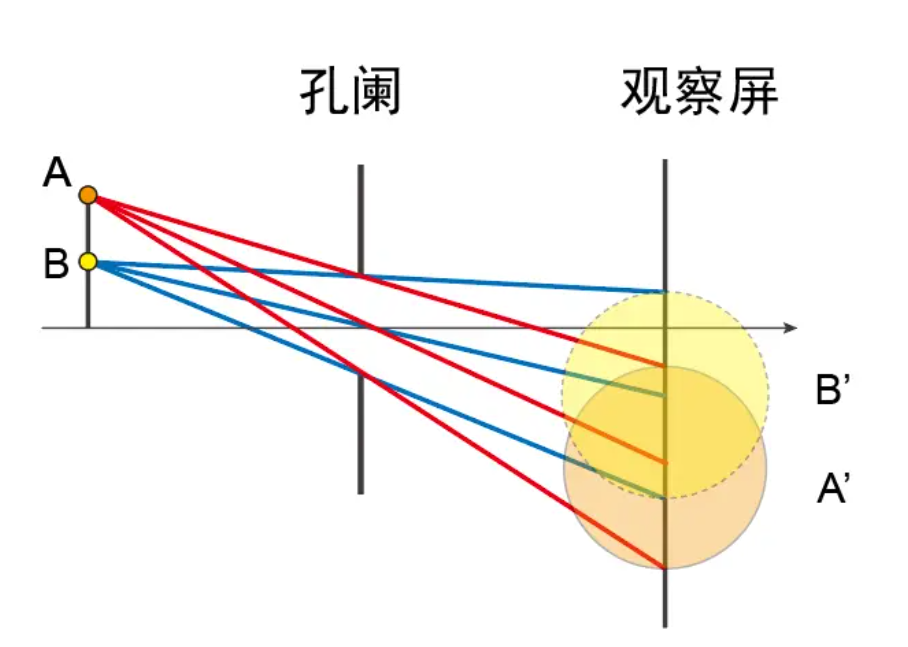
实际相机成像中,这个孔要大得多。对于焦距为50 mm,光圈F2的透镜来说,限制光束的孔的半径为12.5 mm,这个孔我大概估计了一下应该有下图中所示这么大。此时,我们看到,由于孔直径的变大,每个点通过孔的光线不再是一条,而是一束较宽的发散光。点A和点B发出的光在观察屏上交叠在一起,我们无法区分哪部分是A发出的,哪部分是B发出的,此时无法进行成像。
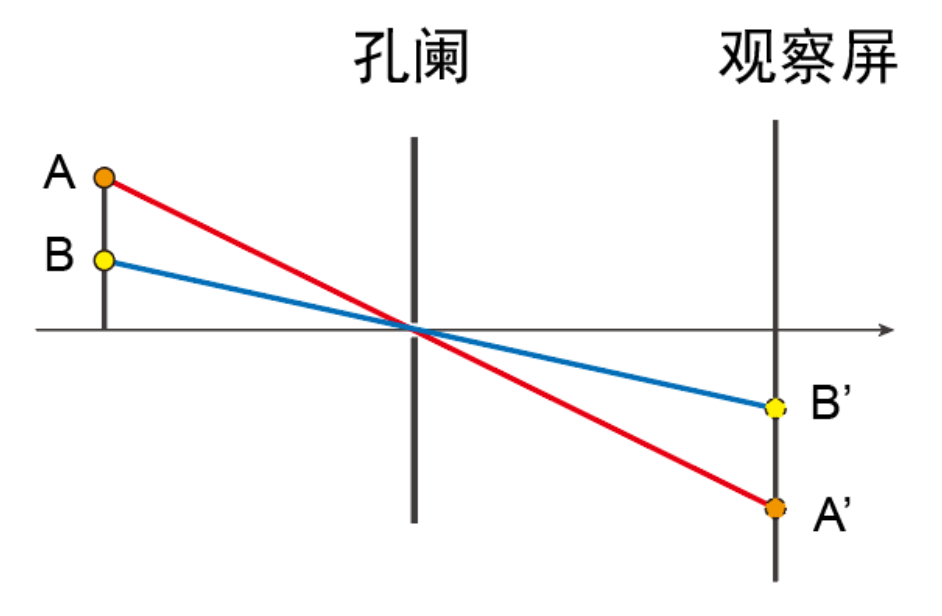
但是,如果我们把观察屏向右移动,会发生什么呢?如下图所示,A和B发出的光线在远处逐渐趋近于平行光,且两个点发出的光在空间上又分开了,我们可以清晰的看到A和B的像A'和B'。另外我们也观察到,此时像的尺寸变大了很多。

既然只要距离足够远,A'和B'总能分开,那么如果我们在孔阑后面加一个凸透镜,让光线提前汇聚一下会发生什么现象呢?按照这个思路,如下图所示,在孔阑后加入凸透镜之后,我们发现A和B在离孔阑不远处就成像了,且由于凸透镜的作用,此时像的尺寸要小于不加凸透镜的时候。
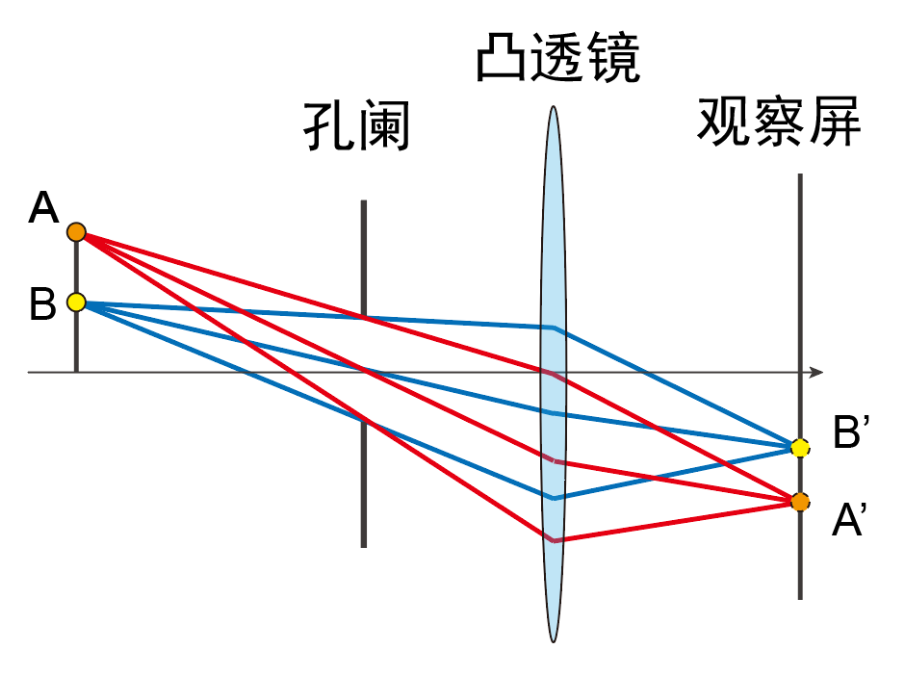
实际上,在上图中,我们已经再现了了相机的基本成像过程,其中,凸透镜代表镜头,而孔阑又被叫做孔径光阑,就是我们常说的光圈,观察屏就是传感器。因此我们可以下结论,小孔成像与凸透镜成像其实是在描述同样一个过程,只是凸透镜成像中有了透镜的参与,将大孔径下的像进行了“提前”成像,也正是因为有了凸透镜改变了原本的光线路径,因此相机成像过程就偏离了传统的小孔成像,在计算成像关系时需要将凸透镜的焦距等因素考虑进去。
什么是焦距
我们都知道相机的成像原理是小孔成像,所以在数码相机中,焦距是指镜头小孔到传感器的距离,单位是mm(毫米)。

相信稍微了解摄影的小伙伴都知道镜头有定焦镜头和变焦镜头。
定焦镜头是指焦距不可变,变焦镜头则是表示镜头焦距可变。
那么焦距是否可变在我们摄影过程中有什么影响吗?
比如我们在拍摄过程中,需要改变人物在画面中的大小,使用定焦镜头则需要拍摄者前后移动自己的位置进行拍摄;而使用变焦镜头则只需要我们改变相机的焦距即可实现,具体分析如下:
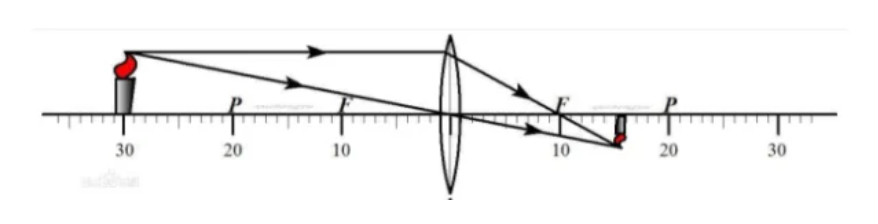
定焦镜头: 要改变人物在相机中成像的大小,需要改变人物和相机之间的距离,即前后移动。如下是将人物远离镜头,从而达到减小人物在画面中成像的大小。
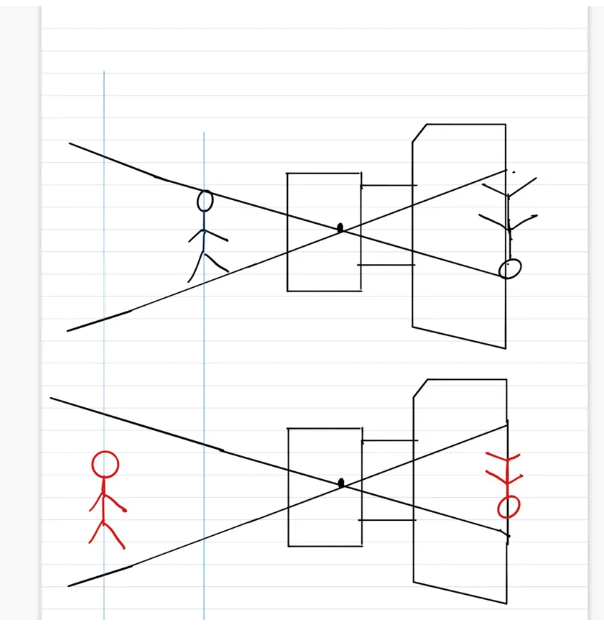
变焦镜头: 要改变人物在相机中的成像大小,可以改变人物和相机之间的距离,也可以改变相机本身的焦距。如下是减小焦距,从而达到减小人物在画面中成像的大小。
在相机中,焦距决定了成像的视野范围以及图像中物体的大小。较长的焦距会产生较窄的视野,使远处的物体看起来更大;而较短的焦距则会产生更宽的视野,使近处的物体看起来更大。
相机模型
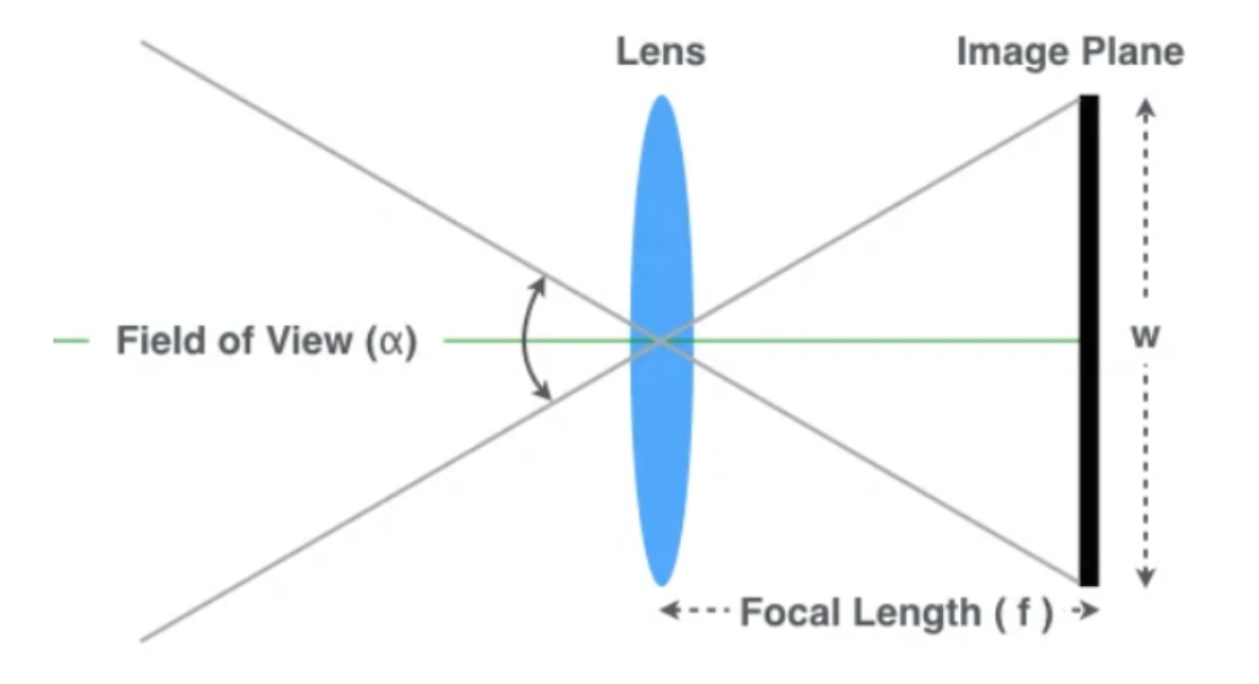
FOV的全称是Field of View (视场角),它表示相机或者人眼可以接收或者显示的影像的角度范围。由于相机的成像原理,一般都会有视场角的限制。
FOV就是相机视锥体的两端的夹角,焦距大概是镜头到“传感器”的距离。
实际的相机,传感器在镜头后面,为了简化,可以假设镜头在传感器的前面,相对镜头镜像。
基本上确定了fov就可以确定摄像机捕捉的视野的范围。